
Developing MEMS Tuning fork gyroscope with low acceleration sensitivity
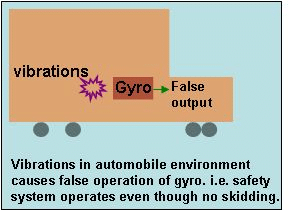
MEMS technology provide us low cost, high functionality, small size, and easily integrated with ASIC. Therefore, MEMS vibrating gyroscopes are having increasing demand in automobile applications such as vehicle dynamics control, rollover protection, and navigation systems. For example, when a car is happened to skid, gyroscope measures rotation rate of car i.e. how much the car is actually turning. The main control unit in car compares gyroscope data with the drivers intended direction data and automatically operates the safety system to minimize skidding. The reliability of gyroscope operation is very important. However, the automobile environment such as humidity, temperature, vibrations is harsh and may cause false operation. In MEMS gyroscopes, vibrations are major source of false operation. The current existing gyroscopes still have problem of vibration output. Our, research area is focused on suppressing the vibration output by mechanical design.
Conference Presentation
Thakur Praveen Singh, Koji Sugano, Toshiyuki Tsuchiya and Osamu Tabata, “Modal harmonic simulation of decoupled resonators for developing MEMS tuning fork gyroscope with low acceleration sensitivity”, , The 6th IEEE International Conference on Nano/Micro Engineered and Molecular Systems, Kaohsiung, Taiwan, pp.1297-1300,2011.
Thakur Praveen Singh, Koji Sugano, Toshiyuki Tsuchiya, and Osamu Tabata,” ANALYSIS OF ACCELERATION SENSITIVITY IN MEMS TUNING FORK GYROSCOPE” Transducers`11, Beijing, China, 2011.